喜迎浙师70周年校庆,3月24日,由浙江师范大学数理医学院、流体与传热技术浙江省国际科技合作基地承办的春季学术报告会在33幢219会议室顺利举行。本次报告会邀请了来自阿利坎特大学的Ahmed Begga Hachlafi博士、Francisco Escolano教授以及来自威尼斯大学的Sebastiano Vascon教授分别作了题为《Dirichlet Neural Networks in Practice:From Theory to State-of-the-Art Applications》《Dirichlet Neural Networks and Applications》《The EasyWalk Project: Intelligent Social Walker for Active Living》的报告。

Francisco Escolano 教授聚焦于图结构数据的表示与学习问题,提出了一种将谱图理论、变分优化与图神经网络深度融合的框架——Dirichlet Networks。研究通过引入可学习的拉普拉斯特征函数作为相对位置编码,结合迹比优化与约束梯度下降方法,有效提升了图神经网络在节点分类、链接预测及图分类等任务中的表现。该工作为图结构数据的深层建模与谱方法在深度学习中的应用提供了新思路。
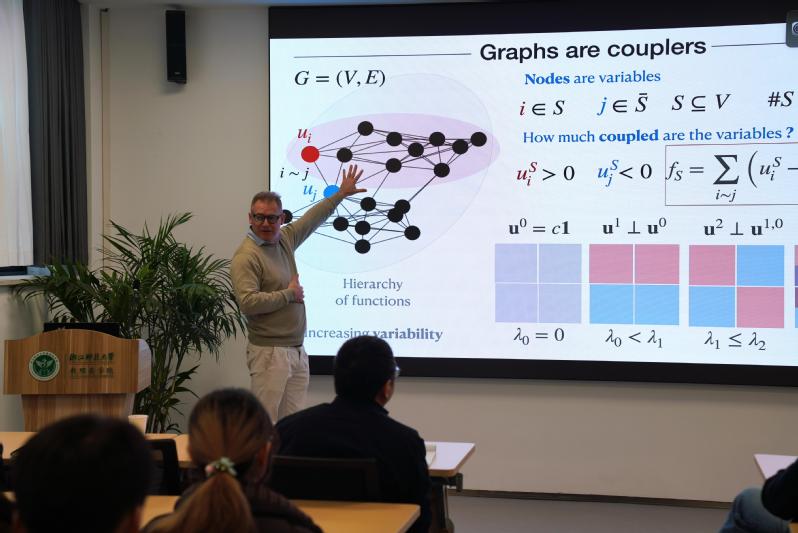
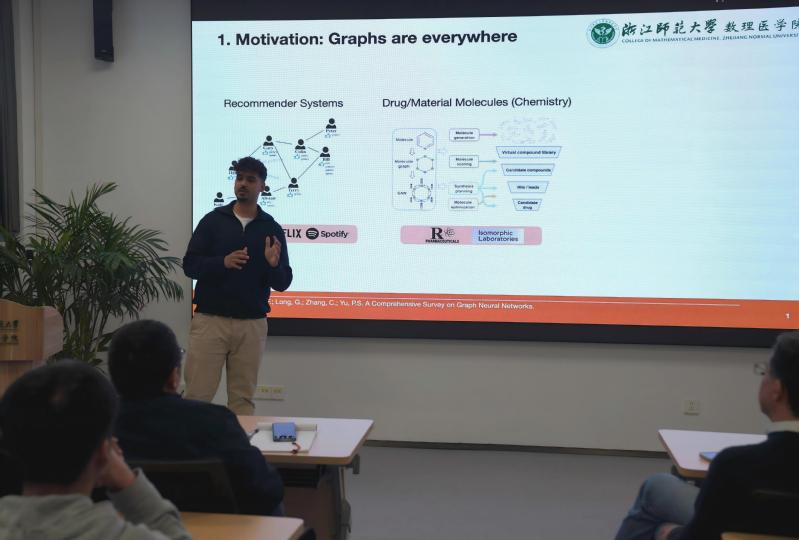
Hachlafi博士深入探讨了狄利克雷神经网络(Dirichlet Neural Networks)的理论基础及其在实际应用中的前沿进展。他首先从谱图理论(Spectral Graph Theory)出发,详细阐述了特征向量作为图上函数、特征值作为能量(Energy=Noise)的数学本质,解释了低特征值对应平滑函数、高特征值对应振荡函数的物理意义。在此基础上,他重点介绍了基于经验特征函数(Empirical Eigenfunctions)的任务反应式谱学习方法,并展示了该方法在节点分类(Node Classification)、链路预测(Link Prediction)及图分类(Graph Classification)等核心任务中的具体应用与可视化效果。
Sebastiano Vascon教授以自研的开放词汇3D目标检测和环境约束轨迹预测算法为核心,介绍了一套能够实时捕捉用户腿部动态并将其转化为平滑辅助动力的技术框架。该框架在零样本3D检测领域超越了现有最先进技术(SOTA),在无需预训练的情况下实现了高达 23-33 FPS 的处理速度,性能显著优于 2024 至 2025 年间的基准模型。通过引入环境碰撞损失函数与对比学习机制,该系统有效解决了传统轨迹预测模型容易穿透静态障碍物的通病,在保证实时避障的同时实现了极高的环境适配率。在此架构下,助行器不仅能智能识别社交群体并进行人脸匹配导航,还通过全本地化的 Jetson AGX 计算平台确保了极高的响应精度与隐私安全,为 2026 年即将开展的临床试验奠定了坚实的理论与技术基础。

本次报告会吸引了大量师生前来聆听,不仅拓宽了与会者的学术视野,更为双方在图深度学习领域的深入合作搭建了良好的交流平台。
